05/08/2013
El control preciso de movimiento es fundamental en numerosos proyectos de electrónica, robótica y automatización. Los motores paso a paso son ideales para esta tarea, ofreciendo un control preciso de posición y rotación. Arduino, con su versatilidad y accesibilidad, se convierte en la plataforma perfecta para controlar estos motores, pero requiere el uso de librerías y drivers adecuados.

¿Qué es un motor paso a paso?
Un motor paso a paso (stepper motor) es un actuador electromecánico que convierte pulsos eléctricos en movimientos mecánicos discretos. Su eje rota en incrementos angulares definidos (pasos), proporcionando una excelente precisión de posicionamiento. A diferencia de los motores DC, no necesita sensores de retroalimentación (encoders) para un control de lazo abierto básico, aunque su uso mejora la precisión y fiabilidad.
Existen varios tipos de motores paso a paso, incluyendo:
- Motores paso a paso de imán permanente: Simples y económicos, ofrecen un alto par a bajas velocidades pero menor precisión.
- Motores paso a paso de reluctancia variable: Utilizan la variación de reluctancia magnética para producir el movimiento; son menos comunes.
- Motores paso a paso híbridos: Combinan las ventajas de los dos tipos anteriores, ofreciendo un buen equilibrio entre par, precisión y velocidad. Son los más utilizados.
También se clasifican según la configuración de sus bobinas:
- Unipolares: Más fáciles de controlar, pero generalmente con menor par que los bipolares.
- Bipolares: Ofrecen mayor par y eficiencia, pero requieren una configuración más compleja.
Drivers para Motores Paso a Paso
Debido a que los motores paso a paso requieren corrientes y voltajes que superan la capacidad de las salidas de Arduino, es necesario un driver o controlador para interconectarlos. Los drivers más populares incluyen:
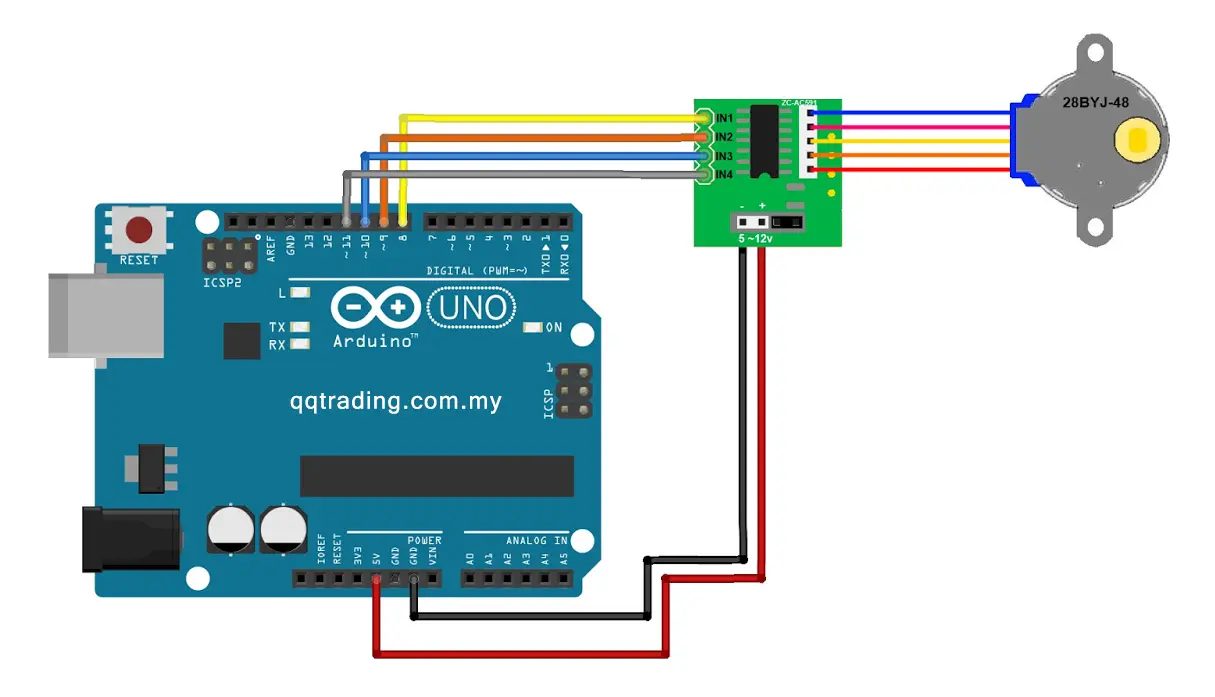
- ULN2003: Sencillo y económico, ideal para motores unipolares de baja potencia. Limitado en corriente.
- L298N: Controlador de doble puente H, capaz de controlar dos motores DC o un motor paso a paso bipolar. Ofrece mayor capacidad de corriente que el ULN200
- A4988 (Pololu): Driver microstepping que permite una mayor resolución de pasos, mejorando la suavidad del movimiento y la precisión. Fácil de usar con Arduino.
- DRV8825: Similar al A4988 en funcionalidad y facilidad de uso.
- TMC2209: Driver de alta gama con características avanzadas, como control de corriente silencioso y una alta resolución de microstepping. Ofrece control más preciso y eficiente, pero con un costo mayor.
Librerías Arduino para Motores Paso a Paso
Arduino simplifica el control de motores paso a paso a través de librerías. La librería más común es AccelStepper, que proporciona un control avanzado, incluyendo:

- Control de velocidad y aceleración: Permite definir perfiles de movimiento suaves y precisos, evitando vibraciones y mejorando la precisión.
- Microstepping: Permite dividir cada paso del motor en pasos más pequeños, para un movimiento aún más suave.
- Movimiento relativo y absoluto: Define el movimiento del motor en términos de pasos desde la posición actual o desde una posición de referencia.
- Multiples motores: Permite controlar múltiples motores paso a paso de forma simultánea o independiente.
Otras librerías disponibles pueden ofrecer funciones especializadas o soporte para drivers específicos. Es importante elegir la librería adecuada para el tipo de motor y el driver utilizado.
Conexión y Programación
La conexión de un motor paso a paso a Arduino implica conectar el driver al Arduino y el motor al driver. La programación con una librería como AccelStepper generalmente implica:

- Incluir la librería:
#include <AccelStepper.h> - Crear un objeto AccelStepper:
AccelStepper stepper(DRIVER, PIN1, PIN2);(donde DRIVER es el tipo de driver y PIN1 y PIN2 son los pines de control del driver). - Configurar la velocidad y aceleración:
stepper.setMaxSpeed(velocidad); stepper.setAcceleration(aceleracion); - Mover el motor:
stepper.moveTo(posicion); stepper.run();ostepper.runToNewPosition(posicion);
Es fundamental consultar la documentación de la librería elegida y la hoja de datos del driver para una configuración precisa.
Tabla Comparativa de Drivers
| Driver | Tipo de Motor | Corriente Máxima | Microstepping | Facilidad de Uso |
|---|---|---|---|---|
| ULN2003 | Unipolar | Baja | No | Alta |
| L298N | Bipolar/Unipolar | Media | No | Media |
| A4988 | Bipolar | Media-Alta | Si | Alta |
| DRV8825 | Bipolar | Media-Alta | Si | Alta |
| TMC2209 | Bipolar | Alta | Si | Media |
Consultas Habituales
- ¿Qué librería debo usar para controlar un motor paso a paso NEMA 17 con un driver A4988? AccelStepper es una excelente opción.
- ¿Cómo puedo controlar la velocidad y la aceleración de un motor paso a paso con Arduino? Usando las funciones
setMaxSpeed()ysetAcceleration()de AccelStepper. - ¿Qué es el microstepping y por qué es útil? El microstepping aumenta la resolución del movimiento del motor, haciendolo más suave y preciso.
El entorno de los motores paso a paso y su control con Arduino ofrece un amplio abanico de posibilidades. Con la librería adecuada y un buen driver, se pueden realizar proyectos de automatización, robótica y control de precisión con resultados satisfactorios. La selección del driver y la librería dependerá de las necesidades específicas del proyecto, considerando factores como la potencia, precisión y complejidad del control deseado.
Si quieres conocer otros artículos parecidos a Librería arduino para motor paso a paso puedes visitar la categoría Libros y Librerías.