13/09/2015
La regulación precisa es fundamental en numerosos sistemas, desde el control de la temperatura en un horno hasta la navegación autónoma de un vehículo. Para lograr este control preciso, se utiliza ampliamente el algoritmo PID (Proporcional, Integral, Derivativo). Este artículo profundiza en el funcionamiento del control PID, su historia, su ajuste y las implicaciones de cada componente (P, I, D).
Historia del Regulador PID
El desarrollo del control PID está intrínsecamente ligado a la necesidad de automatizar procesos. A principios del siglo XX, Nicolas Minorsky, al observar las dificultades en mantener un rumbo constante en los barcos, desarrolló un sistema de control automático que ajustaba el timón basándose en la diferencia entre el rumbo deseado y el rumbo actual. Este sistema sentó las bases del control PID, revolucionando el control de procesos industriales y abriendo camino a una era de automatización.
Cómo se Ajusta un Control PID
Ajustar un control PID puede parecer complejo, pero existen métodos para simplificar el proceso. Muchos métodos tradicionales se basan en la prueba y error, ajustando las constantes Kp, Ki y Kd iterativamente hasta lograr un comportamiento aceptable. Este enfoque puede ser ineficiente y llevar mucho tiempo. Afortunadamente, existen métodos más sistemáticos, como el descrito a continuación:
Método para Ajustar un Control PID de forma matemática
Este método se centra en la caracterización del sistema a controlar para calcular de forma matemática las constantes Kp y Kd (ignorado inicialmente Ki por simplificación). Se requieren:
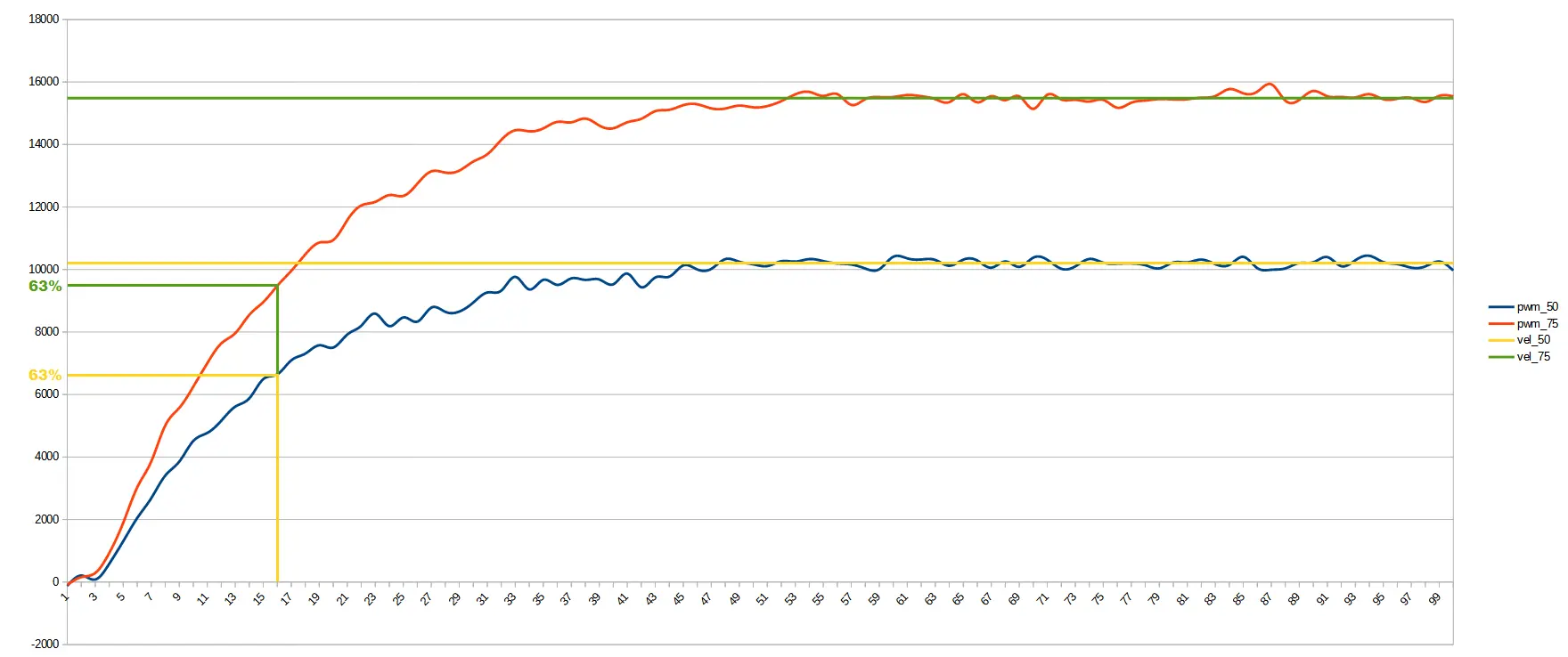
- Caracterización del Sistema: Se necesita un sistema de lectura del sistema (ej: un encoder en un motor). Se mide la velocidad del sistema a diferentes niveles de entrada (ej: PWM en un motor) para obtener la ganancia del sistema (Km).
- Constante de Tiempo: Se mide el tiempo que tarda el sistema en alcanzar el 63% de su velocidad a un determinado nivel de entrada para obtener la constante de tiempo (Tm).
- Variable de Amortiguación (ζ): Se define un valor de amortiguación (generalmente 0.707) para determinar la estabilidad y respuesta del sistema.
- Cálculo de Kp y Kd: Se utilizan fórmulas específicas basadas en Km, Tm y ζ para calcular Kp y Kd. Se puede modificar Tm iterativamente para ajustar la respuesta.
Las fórmulas para el cálculo de Kp y Kd son:
| Constante | Fórmula |
|---|---|
| Kp | Tm / Km 16 / (ζ^2 Td^2) |
| Kd | (8 Tm - Td) / (Td Km) |
Donde Td es el tiempo de estabilización, un buen valor inicial es Tm o la mitad de Tm.
Consideraciones Adicionales
La inclusión de Ki (constante integral) puede mejorar la eliminación del error en estado estacionario, pero también puede introducir inestabilidad. Su inclusión depende de las necesidades específicas del sistema. En algunos casos, como en el control de posición de un servomotor, se puede usar un control PD durante el movimiento y añadir la componente integral ( control PI o PID ) solo al mantener una posición estática.
¿Qué significan Kp, Ki y Kd?
Las constantes Kp, Ki y Kd representan la contribución de cada término del controlador PID:
- Kp (Proporcional): Responde al error actual. Un Kp alto proporciona una respuesta rápida pero puede provocar oscilaciones. Un Kp bajo produce una respuesta lenta pero estable.
- Ki (Integral): Responde a la suma del error a lo largo del tiempo. Elimina el error en estado estacionario, pero puede aumentar las oscilaciones si es demasiado alto.
- Kd (Derivativo): Responde a la tasa de cambio del error. Aumenta la estabilidad y reduce el sobreimpulso, pero puede amplificar el ruido si es demasiado alto.
La interacción entre estas constantes es compleja. Ajustar una afecta a las demás, requiriendo un equilibrio cuidadoso para lograr el rendimiento óptimo.
Ejemplos y Aplicaciones
El control PID tiene una amplia gama de aplicaciones, incluyendo:
- Control de temperatura:
- Control de velocidad de motores:
- Control de posición:
- Control de nivel de líquidos:
- Sistemas de navegación:
En cada aplicación, la elección de las constantes Kp, Ki y Kd se ajustará a las características específicas del sistema a controlar.
El control PID es una herramienta poderosa y versátil para la regulación de sistemas. Si bien su ajuste puede parecer complejo al principio, la comprensión de los principios básicos y el uso de métodos sistemáticos pueden simplificar el proceso. La selección adecuada de las constantes Kp, Ki y Kd es crucial para lograr un control preciso, estable y eficiente.
Consultas Habituales
A continuación, se responden algunas consultas habituales sobre el control PID :
- ¿Qué es un control PD? Un control PD es un controlador que solo utiliza las componentes proporcional y derivativa (Kp y Kd). Se utiliza cuando no se requiere la eliminación del error en estado estacionario.
- ¿Qué es un control PI? Un control PI es un controlador que solo utiliza las componentes proporcional e integral (Kp y Ki). Se utiliza cuando se requiere la eliminación del error en estado estacionario, pero la respuesta derivativa no es crítica.
- ¿Cómo se elige el valor inicial de las constantes PID? No existe un valor universal, la elección inicial depende de las características del sistema a controlar. Se puede empezar con valores bajos y ajustar gradualmente hasta lograr el rendimiento deseado. Los métodos matemáticos ayudan a obtener valores iniciales más precisos.
- ¿Qué ocurre si las constantes PID son demasiado altas o demasiado bajas? Unas constantes demasiado altas pueden provocar inestabilidad y oscilaciones, mientras que unas constantes demasiado bajas pueden resultar en una respuesta lenta y con errores significativos.
La optimización del control PID es un proceso iterativo que requiere experiencia y comprensión de los principios que rigen su funcionamiento. Este artículo proporciona una base sólida para empezar en este maravilloso entorno de la automatización.
Si quieres conocer otros artículos parecidos a Control pid para principiantes puedes visitar la categoría Libros y Librerías.