05/12/2019
El control preciso de motores paso a paso es fundamental en numerosos proyectos de automatización, robótica y control numérico por computadora (CNC). Arduino, con su facilidad de uso y amplia comunidad, se ha convertido en una plataforma popular para estas aplicaciones. En este artículo, exploraremos en detalle cómo utilizar la librería Stepper.h de Arduino para controlar un motor paso a paso, incluyendo conexiones, código y resolución de problemas comunes.
¿Qué es un Motor Paso a Paso?
Un motor paso a paso es un actuador que rota un ángulo específico en respuesta a impulsos digitales. A diferencia de un motor DC, no requiere sensores de retroalimentación para controlar su posición, lo que lo hace ideal para aplicaciones de precisión. Existen diferentes tipos de motores paso a paso, pero los más comunes son los unipolar y bipolar. La elección del motor dependerá de las necesidades del proyecto, considerando factores como el par, la velocidad y el tamaño.
La Librería Stepper.h
Arduino proporciona la librería Stepper.h para simplificar el control de motores paso a paso. Esta librería abstrae la complejidad de la generación de señales de control, permitiendo una programación más sencilla e intuitiva. La librería maneja la secuenciación de los pasos necesarios para que el motor gire en la dirección y el número de pasos deseados.
Conexión del Motor Paso a Paso y el Driver
Es crucial comprender que conectar un motor paso a paso directamente a una placa Arduino suele ser inadecuado, ya que los motores requieren una corriente significativamente mayor de la que la placa puede proporcionar. Por lo tanto, se necesita un driver de motor. El driver actúa como un intermediario, amplificando la señal de control de Arduino y proporcionando la corriente necesaria para el motor. Existen muchos tipos de drivers, como los drivers L293D, ULN2003, y drivers más avanzados como los A4988 o DRV882
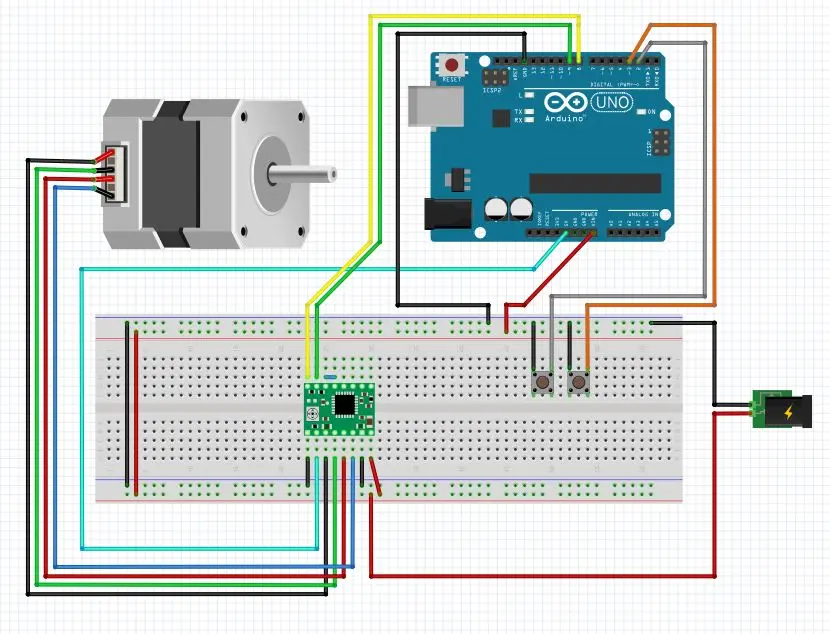
La conexión típica implica:
- Conectar el driver al motor: El driver recibirá alimentación de una fuente de poder externa, mientras que las señales de control provienen de Arduino.
- Conectar el driver a Arduino: Se utilizan pines digitales de Arduino para enviar las señales de dirección (DIR) y paso (STEP) al driver. La señal de ENABLE (si el driver lo tiene) permite habilitar o deshabilitar el driver.
- Alimentación: El motor y el driver necesitan su propia fuente de alimentación independiente, generalmente de mayor voltaje que la de Arduino (5V).
Un diagrama de conexión es esencial para una correcta configuración. La información específica de las conexiones dependerá del driver que se utilice.
Programación con Stepper.h
La librería Stepper.h simplifica la programación. Necesitarás incluirla en tu código:
#include <Stepper.h>Luego, debes definir un objeto Stepper, especificando el número de pasos por revolución del motor y los pines de Arduino conectados a las señales STEP y DIR del driver:
// Define el número de pasos por revolución (ejemplo: un motor de 200 pasos)const int stepsPerRevolution = 200;// Define los pines de Arduino conectados al driverconst int stepPin = 8;const int dirPin = 9;// Crea un objeto StepperStepper myStepper(stepsPerRevolution, stepPin, dirPin);Para controlar el motor, puedes usar los métodos de la librería:
myStepper.step(steps);: Mueve el motor un número específico de pasos. Un valor positivo mueve el motor en una dirección, mientras que un valor negativo lo mueve en la dirección opuesta.myStepper.setSpeed(rpm);: Establece la velocidad del motor en revoluciones por minuto (RPM).
Un ejemplo simple:

void setup() { myStepper.setSpeed(60); // Establece la velocidad a 60 RPM}void loop() { myStepper.step(200); // Gira el motor una revolución completa (200 pasos) delay(1000); // Espera 1 segundo myStepper.step(-200); // Gira el motor en sentido inverso delay(1000); // Espera 1 segundo}Consideraciones Importantes
- Alimentación adecuada: Asegúrate de que el motor y el driver tengan la alimentación adecuada. Una alimentación insuficiente puede dañar los componentes.
- Protección contra sobrecorriente: Es recomendable usar un fusible o un disyuntor para proteger el circuito contra sobrecorriente.
- Disipación de calor: Los drivers pueden generar calor, especialmente a altas corrientes. Considera la necesidad de un disipador de calor para evitar el sobrecalentamiento.
- Microstepping: Algunos drivers soportan microstepping, lo que aumenta la resolución del movimiento del motor. Consulta la documentación del driver para saber si esta función está disponible y cómo configurarla.
Consultas Habituales
¿Cómo solucionar problemas comunes?
Si el motor no funciona, verifica:
- La conexión de los cables.
- La alimentación del motor y el driver.
- El código de Arduino.
- La configuración del driver (microstepping, corriente).
¿Qué driver es el adecuado para mi motor?
La selección del driver dependerá de las características del motor, como la corriente nominal y el voltaje.
¿Puedo usar la librería Stepper.h con otros tipos de motores?
La librería Stepper.h está diseñada específicamente para motores paso a paso. No es adecuada para otros tipos de motores.
Tabla Comparativa de Drivers
| Driver | Corriente | Microstepping | Características |
|---|---|---|---|
| A4988 | 1A | Sí | Fácil de usar, económico |
| DRV8825 | 5A | Sí | Mayor corriente, más opciones de configuración |
| DM542T | 2A | Sí | Alta corriente, para motores más grandes |
Esta tabla es una comparación general. Es vital consultar las especificaciones de cada driver para elegir el apropiado para tu proyecto.
La librería Stepper.h de Arduino facilita el control de motores paso a paso. Combinada con un driver adecuado, permite construir proyectos precisos y robustos. Recuerda la importancia de una correcta conexión, alimentación, y manejo del código para obtener resultados óptimos.
Si quieres conocer otros artículos parecidos a Control de motores paso a paso con arduino y la librería stepper.h puedes visitar la categoría Libros y Librerías.