24/02/2025
En el entorno de la robótica con Arduino, los servomotores son componentes esenciales. Su capacidad para posicionarse con precisión en un ángulo determinado los hace ideales para una amplia gama de proyectos, desde brazos robóticos hasta sistemas de seguimiento solar. Sin embargo, la proliferación de librerías para controlar estos servos en Arduino puede generar confusión. Este artículo profundiza en la gestión de servomotores con Arduino, aclarando las dudas sobre las múltiples librerías disponibles y ofreciendo una información para principiantes y expertos.
¿Qué es un Servomotor?
Un servomotor, o servo, es un motor de corriente continua (DC) con un sistema de retroalimentación que le permite controlar con precisión su posición angular. Su estructura interna incluye:
- Motor DC: Proporciona la fuerza de rotación.
- Caja reductora: Aumenta el torque y disminuye la velocidad.
- Potenciómetro: Mide la posición angular del eje.
- Circuito de control: Compara la posición deseada con la posición actual, ajustando el motor para alcanzar el objetivo.
La mayoría de los servos utilizados en robótica tienen un conector de tres cables: VCC (rojo - alimentación), GND (marrón - tierra) y Señal (naranja - datos).
Tipos de Servomotores y Selección
Existen diversos tipos de servomotores en el mercado, que se diferencian principalmente por su torque (fuerza de rotación). Es crucial elegir un servo con un torque adecuado a la aplicación. Un servo con un torque excesivo puede ser innecesario y consumir más energía, mientras que un servo con torque insuficiente puede dañarse bajo carga excesiva. A continuación, se muestra una tabla comparativa de algunos modelos comunes:
| Modelo | Voltaje (V) | Torque (kg/cm) |
|---|---|---|
| SG90 | 3-2 | 1-6 |
| SG-5010 | 8-6 | 5-5 |
| MG995 | 8-2 | 5-10 |
| MG946 | 8-2 | 5-14 |
| RDS3115 | 5-2 | 15-15 |
Consideraciones de Alimentación: La alimentación del servo debe ser adecuada al modelo. Servos de mayor tamaño o torque requieren una fuente de alimentación externa, ya que la corriente suministrada por el puerto USB de Arduino puede ser insuficiente.
Librería Servo de Arduino: La Solución Principal
El IDE de Arduino incluye una librería dedicada al control de servomotores, la Servo Library. Esta librería simplifica significativamente la interacción con los servos, ofreciendo funciones intuitivas para controlar su posición.
Limitaciones de la Librería Servo
Tener en cuenta las limitaciones de la librería Servo de Arduino:
- Número de Servos: La cantidad de servos que se pueden controlar simultáneamente depende del tipo de placa Arduino. En la mayoría de las placas, el límite es de 12 servos, mientras que el Arduino Mega admite hasta 4El uso de la librería puede deshabilitar la funcionalidad PWM en ciertos pines dependiendo de la placa y la cantidad de servos conectados.
- Pines PWM Ocupados: El uso de la librería Servo ocupa pines PWM en la placa Arduino, que son los mismos usados para otras funciones. Si usas muchos servos puede que tengas que organizar tus pines con cuidado.
Funciones Principales de la Librería Servo
Las funciones más importantes de la librería Servo son:
attach(pin): Asocia un objeto Servo a un pin específico de la placa Arduino.attach(pin, min, max): Asocia un objeto Servo a un pin, especificando los valores mínimos y máximos del ancho de pulso (en microsegundos) para el rango de movimiento del servo (generalmente 0° y 180°).write(angle): Manda un ángulo (de 0 a 180 grados) al servo.writeMicroseconds(us): Envía un ancho de pulso (en microsegundos) al servo, permitiendo un control más preciso.read(): Lee la posición actual del servo en grados.attached(pin): Verifica si un objeto Servo está conectado a un pin dado.detach(): Desconecta un objeto Servo de un pin.
Ejemplos Prácticos
Control de un Servomotor por Ángulo
Este ejemplo muestra como controlar un servo utilizando la librería Servo, haciendo que el servo gire a 0°, 90°, 180° y de nuevo a 90°:
#include <Servo.h>Servo myservo;void setup() { myservo.attach(3); // Pin 3 conectado al servo Serial.begin(9600);}void loop() { // ... (Código para mover el servo a diferentes ángulos) ...}Control de un Servomotor con un Potenciómetro
En este ejemplo, se utiliza un potenciómetro para controlar la posición del servo. La posición del potenciómetro se mapea al rango de 0 a 180 grados:
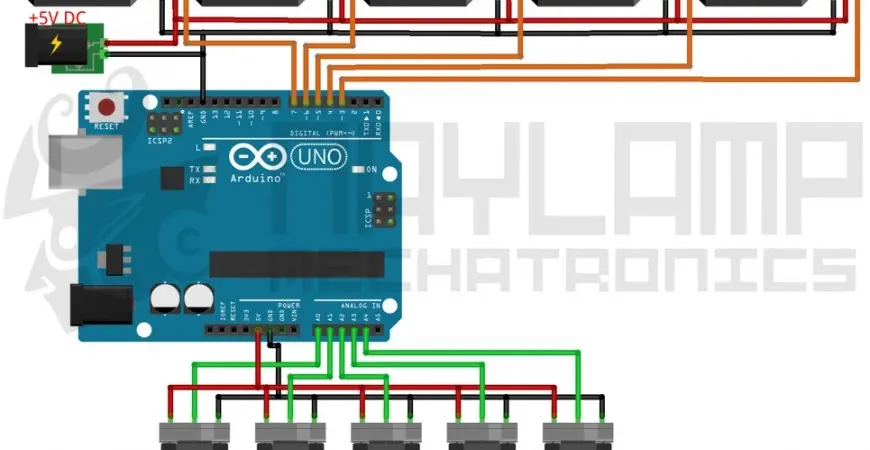
#include <Servo.h>Servo myservo;void setup() { myservo.attach(3); Serial.begin(9600);}void loop() { // ... (Código para leer el potenciómetro y controlar el servo) ...}Control de Múltiples Servomotores
Este ejemplo expande el concepto anterior para controlar varios servos simultáneamente:
#include <Servo.h>Servo servo1, servo2, servo3; // Declaración de múltiples objetos Servovoid setup() { servoattach(3); servoattach(4); servoattach(5); Serial.begin(9600);}void loop() { // ... (Código para controlar múltiples servos con potenciómetros o otros sensores) ...}Solución de Problemas
Si el servo no se mueve como se espera, puede deberse a varios factores:
- Conexiones incorrectas: Verificar que las conexiones entre el Arduino, el servo y la fuente de alimentación sean correctas.
- Alimentación insuficiente: Asegurarse de que la fuente de alimentación proporcione suficiente corriente para el servo.
- Ancho de pulso incorrecto: Ajustar los valores mínimo y máximo del ancho de pulso en la función
attach()si el rango de movimiento del servo no es el esperado. - Conflictos de pines: Si se utiliza la librería Servo junto con otras librerías que utilizan pines PWM, puede producirse un conflicto.
Conclusión
La librería Servo de Arduino proporciona una forma sencilla y eficiente de controlar servomotores. Comprender sus funciones y limitaciones es fundamental para desarrollar proyectos robóticos robustos y fiables. Experimentar con los ejemplos proporcionados y adaptar el código a las necesidades específicas de cada proyecto es la mejor manera de dominar el control de servos con Arduino.
Si quieres conocer otros artículos parecidos a Arduino: múltiples librerías para servos - información puedes visitar la categoría Libros y Librerías.